四轮转向系统(4WS)是一种通过后轮协同前轮转向提升车辆操控性的技术。其核心原理为低速时后轮与前轮反向偏转以减小转弯半径,高速时同向偏转增强稳定性,并通过电子控制单元(ECU)实时调节后轮转向角。系统由转向机构、ECU、传感器(转向角/车速/车身姿态传感器)及执行器(电动马达/液压缸)构成,支持主动式(配备转向机)与被动式(橡胶形变转向)两种类型。
四轮转向系统(4WS),是指后轮也和前轮相似,具有一定的转向功能,不仅可以与前轮同方向转向,也可以与前轮反方向转向。
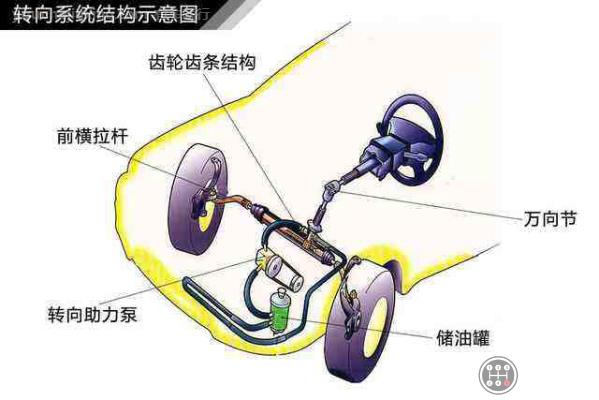
(如上图所示,汽车转向系统结构)
四轮转向系统的主要作用
(1)提高汽车在高速行驶或在侧向风力作用时的操作稳定性;
(2)能在整个车速范围内提高车辆对转向输入的响应速度;
(3)改善在低速下的操纵轻便性,以及减小汽车转弯半径,改善机动性。
4WS 汽车在低速转弯时,前后车轮逆相位转向,可减小车辆的转弯半径;在高速转弯时,前后轮主要作同相位转向,能减少车辆质心侧偏角,降低车辆横摆率的稳态超调量等,进一步提高车辆操纵稳定性。